




যান্ত্রিক excavators নিরাপত্তা প্রধান বিপদ, বিপজ্জনক অবস্থা বা আর্থওয়ার্ক নির্মাণ ব্যবহার, অপারেশন এবং রক্ষণাবেক্ষণের ক্ষেত্রে বিপজ্জনক ঘটনা দ্বারা সৃষ্ট ঝুঁকি নির্মূল বা কমানোর প্রযুক্তিগত ব্যবস্থার সাথে সম্পর্কিত। যান্ত্রিক excavators জন্য পরিদর্শন মান কি? কিভাবে যান্ত্রিক excavators পরিদর্শন করা হয়?

যান্ত্রিক খননকারী
যান্ত্রিক খননকারীরা খননকারীদের উল্লেখ করে যাদের উপরের কাঠামো তারের দড়ি দ্বারা পরিচালিত হয়। তারা প্রধানত খনন কাজের জন্য টেনে আনা বেলচা, সামনের বেলচা বা গ্র্যাব বালতি ব্যবহার করে; টেম্পিং প্লেট ব্যবহার করুন উপকরণ ট্যাম্প করতে; ক্রাশিং অপারেশনের জন্য হুক বা বল ব্যবহার করুন; এবং বিশেষ কাজের ডিভাইস এবং সংযুক্তি ব্যবহার করুন। উপাদান হ্যান্ডলিং আউট বহন.
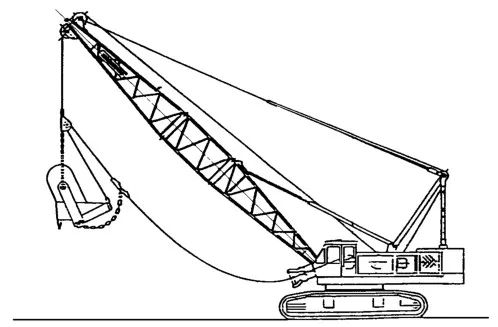
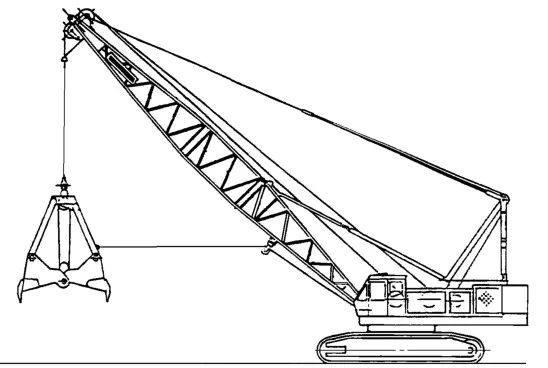
ক্রলার যান্ত্রিক খননকারী সরঞ্জাম সহ
যান্ত্রিক খননকারীপরিদর্শন মান প্রয়োজনীয়তা
01যান্ত্রিক খননকারী পরিদর্শন-ড্রাইভার অপারেটিং অবস্থান পরিদর্শন
- সরঞ্জাম
রাইড-অন মেশিনের ড্রাইভারের অবস্থানে একটি ড্রাইভারের ক্যাব ইনস্টল করা উচিত।
1,500 কেজির বেশি কাজের ভর এবং ড্রাইভারের অবস্থান সহ মেশিনগুলিকে ড্রাইভারের ক্যাব দিয়ে সজ্জিত করা উচিত। 1,500 কেজির কম বা সমান কাজের ভর সহ মেশিনগুলিকে ড্রাইভারের ক্যাব দিয়ে সজ্জিত করার প্রয়োজন নেই।
আর্থমোভিং মেশিনারী এমনভাবে ডিজাইন করা উচিত যাতে এমন অ্যাপ্লিকেশনগুলিতে ব্যবহার করার সময় পর্যাপ্ত প্রতিরক্ষামূলক ডিভাইস ইনস্টল করা হয় যেখানে উড়ন্ত ধ্বংসাবশেষের ঝুঁকি থাকে (যেমন হাইড্রলিক্স ব্যবহার করে)।
- ন্যূনতম কার্যকলাপ স্থান
ড্রাইভারদের জন্য সর্বনিম্ন চলাচলের স্থান ISO 3411 মেনে চলতে হবে।
ড্রাইভারের অবস্থান এবং নিয়ন্ত্রণের অবস্থানের জন্য সর্বনিম্ন স্থান ISO 6682 মেনে চলতে হবে
- চলন্ত অংশ
চাকা, বেল্ট বা কাজের সরঞ্জাম বা সংযুক্তির মতো চলমান অংশগুলির সাথে চালকের অবস্থান থেকে দুর্ঘটনাজনিত যোগাযোগ এড়াতে ব্যবস্থা করা উচিত।
- ইঞ্জিন নিষ্কাশন
ইঞ্জিন থেকে নির্গত গ্যাসকে ড্রাইভার এবং ক্যাবের এয়ার ইনলেট থেকে দূরে রাখতে হবে
- চালকের লাইসেন্স ক্রয় এবং জমা
ড্রাইভারের ম্যানুয়াল বা অন্যান্য অপারেটিং নির্দেশাবলী নিরাপদে সংরক্ষণ করার জন্য ড্রাইভারের অবস্থানের কাছে একটি স্থান প্রদান করা উচিত। যদি চালকের অবস্থান লক করা যায় না বা ড্রাইভারের ক্যাব না থাকে তবে স্থানটি লকযোগ্য হওয়া উচিত।
- ধারালো প্রান্ত
চালকের কর্মক্ষেত্রে (যেমন সিলিং, ভিতরের ইন্সট্রুমেন্ট প্যানেল এবং চালকের অবস্থানে যাওয়ার পথ) কোনো উন্মুক্ত ধারালো প্রান্ত বা কোণ থাকা উচিত নয়।
-চালকের অবস্থানে জলবায়ু পরিস্থিতি
চালকের ক্যাব চালককে সম্ভাব্য প্রতিকূল আবহাওয়া থেকে রক্ষা করতে হবে। বায়ুচলাচল ব্যবস্থা, সামঞ্জস্যযোগ্য হিটিং সিস্টেম এবং গ্লাস ডিফ্রস্টিং সিস্টেমের জন্য প্রস্তুতিগুলি প্রবিধান অনুসারে ইনস্টল করা উচিত।
- হার্ড পাইপ এবং পায়ের পাতার মোজাবিশেষ
ক্যাবটি 5 MPa-এর বেশি তরল চাপ বা 60 C-এর বেশি তাপমাত্রা এবং পায়ের পাতার মোজাবিশেষ দিয়ে সজ্জিত।
-প্রবেশ এবং প্রস্থানের প্রাথমিক পথ
একটি মৌলিক অ্যাক্সেস খোলার ব্যবস্থা করা হবে, যার মাত্রা ISO 2867 অনুযায়ী হবে।
- বিকল্প প্রবেশ ও প্রস্থান
প্রাথমিক প্রবেশ/প্রস্থান থেকে ভিন্ন দিকে একটি বিকল্প প্রবেশ/প্রস্থান প্রদান করা হবে। এর মাত্রাগুলি ISO 2867 মেনে চলবে৷ এটি একটি জানালা বা অন্য দরজা হতে পারে যা চাবি বা সরঞ্জাম ছাড়াই খোলা বা সরানো যায়৷ যদি প্রবেশদ্বারটি চাবি বা সরঞ্জাম ছাড়াই ভিতরে থেকে খোলা যায় তবে একটি কুঁচি ব্যবহার করুন। ভাঙা যায় এমন কাঁচের দরজা এবং উপযুক্ত আকারের জানালাগুলিকেও উপযুক্ত বিকল্প প্রস্থান হিসাবে বিবেচনা করা যেতে পারে, যদি ক্যাবে প্রয়োজনীয় পালানোর হাতুড়ি সরবরাহ করা হয় এবং ড্রাইভারের নাগালের মধ্যে রাখা হয়।
- বায়ুচলাচল ব্যবস্থা
বায়ুচলাচল ব্যবস্থাটি চালকের ক্যাবে তাজা বাতাস সরবরাহ করতে সক্ষম হওয়া উচিত যার প্রবাহের হার 43 m/h এর কম নয়। ফিল্টার SO 10263-2 অনুযায়ী পরীক্ষা করা হবে।
- ডিফ্রস্ট সিস্টেম
ডিফ্রস্টিং সিস্টেমের সামনের এবং পিছনের উইন্ডো ডিফ্রস্টিং ডিভাইসগুলি প্রদান করা উচিত, যেমন একটি হিটিং সিস্টেম বা একটি ডেডিকেটেড ডিফ্রস্টিং ডিভাইসের মাধ্যমে।
- সুপারচার্জিং সিস্টেম
যদি প্রেসারাইজেশন সিস্টেম সহ একটি ক্যাব সরবরাহ করা হয়, তাহলে প্রেসারাইজেশন সিস্টেমটি SO 10263-3 এর বিধান অনুসারে পরীক্ষা করা হবে এবং 50 Pa এর কম নয় এমন একটি আপেক্ষিক ইনডোর চাপ প্রদান করবে।
- দরজা এবং জানালা
দরজা, জানালা এবং ফ্ল্যাপগুলি তাদের উদ্দেশ্যমূলক অপারেটিং অবস্থানে নিরাপদে সংযত করা উচিত। দরজাগুলিকে তাদের উদ্দেশ্যমূলক অপারেটিং পজিশনে বেসিক প্রবেশদ্বার ও প্রস্থানের নিরাপদ খোলার জন্য পরিকল্পিত অনমনীয় অপারেটিং পজিশনে রাখা উচিত, এবং নিয়ন্ত্রণগুলি সহজেই চালকের অবস্থান বা চালকের প্রবেশদ্বার প্ল্যাটফর্ম থেকে ছেড়ে দেওয়া উচিত।
গাড়ির জানালা একই নিরাপত্তা কর্মক্ষমতা সহ নিরাপত্তা বা অন্যান্য উপকরণ সঙ্গে ইনস্টল করা উচিত.
সামনের জানালাগুলি বৈদ্যুতিক ওয়াইপার এবং ওয়াশার দিয়ে সজ্জিত করা উচিত।
উইন্ডো ওয়াশারের জলের ট্যাঙ্কটি সহজেই অ্যাক্সেসযোগ্য হওয়া উচিত।
- অভ্যন্তরীণ আলো
ড্রাইভারের ক্যাবটি একটি নির্দিষ্ট অভ্যন্তরীণ আলোক ডিভাইসের সাথে সজ্জিত করা উচিত, যা ইঞ্জিন বন্ধ করার পরেও কাজ করবে, যাতে ড্রাইভারের অবস্থান আলোকিত করা যায় এবং ড্রাইভারের ম্যানুয়ালটি পড়া যায়।
- ড্রাইভারের প্রতিরক্ষামূলক ঢাল
যান্ত্রিক খননকারীদের ড্রাইভারের (শীর্ষ প্রহরী এবং সামনের রক্ষী) জন্য প্রতিরক্ষামূলক কাঠামো ইনস্টল করতে সক্ষম হওয়া উচিত। প্রস্তুতকারকের প্রতিরক্ষামূলক কাঠামো প্রদান করা উচিত (শীর্ষ গার্ড এবং সামনের গার্ড), যা ব্যবহারকারীর দ্বারা বিদ্যমান অ্যাপ্লিকেশন ঝুঁকির উপর ভিত্তি করে নির্বাচন করা উচিত।
-ফলিং অবজেক্ট প্রোটেক্টিভ স্ট্রাকচার (FOPS)
ISO3449-এ নির্দিষ্ট ব্যতিক্রমগুলি ব্যতীত, পতনশীল বস্তুর ঝুঁকি সহ অবস্থানগুলিতে ব্যবহার করা হবে বলে প্রত্যাশিত বর্গাকার ক্রেনগুলি এমনভাবে ডিজাইন করা উচিত যাতে একটি পতনশীল বস্তুর প্রতিরক্ষামূলক কাঠামো (FOPS) ইনস্টল করতে সক্ষম হয়৷
02যান্ত্রিক খননকারী পরিদর্শন -ড্রাইভারের নিয়ন্ত্রণ এবং সূচক
- ডিভাইস শুরু এবং বন্ধ করুন
আর্থমুভিং মেশিনারীতে স্টার্টিং এবং স্টপিং ডিভাইস (যেমন কী) দিয়ে সজ্জিত করা উচিত এবং অননুমোদিত ব্যবহার রোধ করার জন্য স্টার্টিং সিস্টেমটি প্রতিরক্ষামূলক ডিভাইস দিয়ে সজ্জিত করা উচিত।
আর্থ-মুভিং মেশিনারি এমনভাবে ডিজাইন করা উচিত যে ইঞ্জিন শুরু বা বন্ধ হয়ে গেলে, নিয়ন্ত্রণ শুরু না করে মেশিন, কাজের সরঞ্জাম এবং সংযুক্তিগুলি সরানো অসম্ভব।
- অপ্রত্যাশিত অপারেশন
দুর্ঘটনাজনিত অপারেশনের কারণে বিপদের কারণ হতে পারে এমন নিয়ন্ত্রণ ডিভাইসগুলিকে ঝুঁকি কমানোর নীতি অনুসারে সাজানো বা নিষ্ক্রিয় বা সুরক্ষিত করা উচিত। বিশেষ করে, যখন ড্রাইভার প্রবেশ করে এবং চালকের অবস্থান থেকে প্রস্থান করে, যে ডিভাইসটি নিয়ন্ত্রণ অক্ষম করে সেটি স্ব-সক্রিয় হওয়া উচিত, অথবা এটি প্রাসঙ্গিক ডিভাইস দ্বারা জোরপূর্বক উদ্দীপিত এবং সক্রিয় করা উচিত।
- প্যাডেল প্যাডেল
তাদের মধ্যে উপযুক্ত আকার, আকৃতি এবং পর্যাপ্ত ব্যবধান থাকতে হবে। ট্রেডগুলির একটি নন-স্লিপ পৃষ্ঠ থাকা উচিত এবং এটি পরিষ্কার করা সহজ। যদি পৃথিবী-চলন্ত যন্ত্রপাতির প্যাডেল এবং অটোমোবাইলের প্যাডেল একই কাজ করে (ক্লাচ, ব্রেকিং এবং ত্বরণ), মেশানোর ফলে সৃষ্ট বিপদ এড়াতে, প্যাডেলগুলি একইভাবে সাজানো উচিত।
সংযুক্তি জরুরী অবতরণ
ইঞ্জিন স্টল হলে, এটি সম্ভব হওয়া উচিত:
· ওয়ার্কিং ডিভাইস/অ্যাটাচমেন্টকে মাটিতে/র্যাকে নামিয়ে দিন;
· কাজের ইউনিট/অ্যাটাচমেন্টের লোয়ারিং সেই অবস্থান থেকে দৃশ্যমান হয় যেখানে ড্রাইভার লোয়ারিং কন্ট্রোল সক্রিয় করে:
· কাজের সরঞ্জাম/আনুষঙ্গিক সরঞ্জামগুলির প্রতিটি জলবাহী এবং বায়ুসংক্রান্ত সার্কিটে অবশিষ্ট চাপ দূর করুন যা ঝুঁকির কারণ হতে পারে৷ সংযুক্তিগুলি কমানোর বিধান এবং অবশিষ্ট চাপ অপসারণের উপায়গুলি ড্রাইভারের অবস্থানের বাইরে অবস্থিত হতে পারে এবং ড্রাইভারের ম্যানুয়ালটিতে বর্ণনা করা হবে
- অনিয়ন্ত্রিত আন্দোলন
চালক দ্বারা চালিত হলে, স্লিপিং বা ধীরগতির কারণে (যেমন লিকেজের কারণে) বা যখন পাওয়ার সাপ্লাই বাধাগ্রস্ত হয় তখন স্থির অবস্থান থেকে মেশিন এবং কাজের ডিভাইস বা সংযুক্তিগুলির চলাচল এমন একটি সীমার মধ্যে নিয়ন্ত্রণ করা উচিত যা ঝুঁকি তৈরি করে না। উন্মুক্ত ব্যক্তিদের কাছে।
- ভিজ্যুয়াল ডিসপ্লে/কন্ট্রোল প্যানেল, সূচক এবং প্রতীক
· চালককে দিনে বা রাতে চালকের অবস্থান থেকে মেশিনের স্বাভাবিক কার্যকারিতার প্রয়োজনীয় ইঙ্গিত দেখতে সক্ষম হওয়া উচিত। একদৃষ্টি কম করা উচিত.
· মেশিনের স্বাভাবিক ক্রিয়াকলাপ এবং সুরক্ষার জন্য নিয়ন্ত্রণ সূচকগুলি সুরক্ষা এবং সম্পর্কিত বিষয়ে ISO 6011 এর বিধানগুলি মেনে চলা উচিত।
· আর্থমুভিং মেশিনারিতে ভিজ্যুয়াল ডিসপ্লে/নিয়ন্ত্রণ ডিভাইসের জন্য প্রতীকগুলি প্রযোজ্য হিসাবে ISO 6405-1 বা S 6405-2 এর বিধানগুলি মেনে চলতে হবে।
- রাইড-অন মেশিনের কন্ট্রোল ডিভাইসগুলি যেগুলি স্থল থেকে চালিত করার উদ্দেশ্যে নয় সেগুলিকে স্থল থেকে কন্ট্রোল ডিভাইসটি তোলার সম্ভাবনা হ্রাস করার উপায় সরবরাহ করতে হবে।
- নন-রাইড-অন মেশিনগুলিকে একটি হোল্ডিং অপারেশন ডিভাইস দিয়ে সজ্জিত করা উচিত যা মেশিনের ক্রিয়াকলাপ এবং ইমপ্লিমেন্টের বিপজ্জনক চলাচল বন্ধ করে দেয় যখন ড্রাইভার নিয়ন্ত্রণ ছেড়ে দেয়। নিয়ন্ত্রণগুলি অপারেটরের দিকে মেশিনের দুর্ঘটনাজনিত চলাচলের ঝুঁকি বিবেচনায় ডিজাইন করা উচিত।
03যান্ত্রিক খননকারী পরিদর্শন-স্টিয়ারিং সিস্টেম পরিদর্শন
- স্টিয়ারিং সিস্টেমটি নিশ্চিত করা উচিত যে স্টিয়ারিং কৌশলটি নির্দিষ্ট স্টিয়ারিং দিকনির্দেশের সাথে সামঞ্জস্যপূর্ণISO 10968।
- ফরোয়ার্ড/রিভার্স বেল্ট-কাভার মেশিন বেল্ট-কাভার মেশিনের স্টিয়ারিং সিস্টেম 20 কিমি/ঘণ্টার বেশি গতিতে চলা উচিত।
04যান্ত্রিক খননকারী পরিদর্শন-সুইং ব্রেক সিস্টেম পরিদর্শন
যান্ত্রিক খননকারীদের সুইং অপারেশন এবং পার্কিং ব্রেক সিস্টেমের সাথে সজ্জিত করা উচিত।
05যান্ত্রিক খননকারী পরিদর্শন-উত্তোলন সিস্টেম পরিদর্শন
- জোরপূর্বক নিয়ন্ত্রণ (বাড়া/নিচু)
যান্ত্রিক খননকারীর উত্তোলন ব্যবস্থা একটি ব্রেক দিয়ে সজ্জিত করা উচিত। হ্যান্ডেল বা প্যাডেল ছাড়ার সাথে সাথে ব্রেক সক্রিয় করা উচিত। ব্রেকিং সিস্টেমটি স্বয়ংক্রিয়ভাবে শক্তি হারানোর ক্ষেত্রে বা জোরপূর্বক নিয়ন্ত্রণ হ্রাসের ক্ষেত্রে সক্রিয় হওয়া উচিত এবং খননকারী অপারেশনের স্থায়িত্বকে প্রভাবিত করা উচিত নয়। ব্রেকিং সিস্টেমটি 4.8-এ নির্দিষ্ট রেট করা লোড বজায় রাখতে সক্ষম হওয়া উচিত
- বিনামূল্যে পতন অপারেশন
একটি যান্ত্রিক খননকারীর উত্তোলন ব্যবস্থা একটি ব্রেক দিয়ে সজ্জিত করা উচিত এবং নিম্নলিখিত শর্তগুলির অধীনে অবিলম্বে সক্রিয় করা হবে:--ফুট প্যাডেলের সংশ্লিষ্ট অপারেশন;
হাতের লিভার ছেড়ে দিন।
ব্রেকগুলি একটি চলমান লোডের ক্রমাগত ব্রেকিং প্রদানের জন্য ডিজাইন করা হবে৷ গাইডটি তারের দড়ি যাতে নিয়ন্ত্রণের বাইরে না যায় বা উঠতে না পারে সে জন্য ডিজাইন করা উচিত৷
-সুইচ
ফোর্সড কন্ট্রোল অপারেশন থেকে ফ্রি ড্রপ অপারেশনে স্যুইচ করার সময়, লোডের কোন ড্রপ থাকা উচিত নয়।
-বুম
একটি যান্ত্রিক খননকারীর বুম হঠাৎ আনলোড হওয়ার ক্ষেত্রে রিবাউন্ড থেকে রক্ষা করা উচিত। বিপরীত ওভারলোডিং এড়াতে বুম একটি সীমা সুইচ দিয়ে সজ্জিত করা উচিত।
বুমের বিভিন্ন অংশের মধ্যে সংযোগ (বোল্ট) এমনভাবে ডিজাইন করা উচিত যাতে কর্মীদের বুমের নীচে দাঁড়ানোর প্রয়োজন ছাড়াই ইনস্টলেশন এবং অপসারণ করা যায়।
-তারের দড়ি
যান্ত্রিক খননকারী তারের দড়ির নিরাপত্তা ফ্যাক্টর নির্ধারণ করা উচিত।
-তারের দড়ি ড্রাম এবং তারের দড়ি পুলি
· তারের দড়ির ড্রাম এবং তারের দড়ির পুলির নকশা এবং উত্পাদন তারের দড়ি এবং স্লিপেজ বা তারের দড়ি গাইড বুশিংয়ের বিচ্ছিন্নতা রোধ করা উচিত।
· তারের দড়ি ড্রাম ব্যাসের সাথে তারের দড়ির ব্যাসের অনুপাত কমপক্ষে 20:1 হওয়া উচিত।
· দড়ির খাঁজে পরিমাপ করা তারের দড়ি পুলি ব্যাসের সাথে তারের দড়ির ব্যাসের অনুপাত কমপক্ষে 22:1 হওয়া উচিত। ড্র্যাগলাইন গাইড, গাইড পুলি এবং অক্জিলিয়ারী তারের দড়ি বাদ দেওয়া হয়।
ক্রিম্পিং রিম, উইঞ্চ ড্রামের প্রান্তটি তারের দড়ির ব্যাসের কমপক্ষে 1.5 গুণ হওয়া উচিত।
06যান্ত্রিক খননকারী পরিদর্শন-সীমাবদ্ধতা ডিভাইস পরিদর্শন
- লোড মোমেন্ট লিমিটার
উপাদান হ্যান্ডলিং অবস্থার মধ্যে, উত্তোলন সিস্টেম এবং বুম উত্তোলন সিস্টেম ওভারলোড এড়াতে একটি লোড মোমেন্ট লিমিটার দিয়ে সজ্জিত করা উচিত। লোড মোমেন্ট লিমিটারটি 10% সহনশীলতার সাথে 4.8-এ নির্দিষ্ট রেট করা লোডের সাথে সেট করা উচিত। লোড মোমেন্ট লিমিটার চালিত হওয়ার পরে, লোড মুহূর্ত হ্রাস করা উচিত। 4.7.2 লিমিট সুইচ তুলুন।
উপাদান হ্যান্ডলিং অবস্থার মধ্যে, যান্ত্রিক excavators উদ্ধরণ আন্দোলনের জন্য সীমা সুইচ দিয়ে সজ্জিত করা উচিত. সীমা সুইচ সক্রিয় করার পরে, বুম কম করতে সক্ষম হওয়া উচিত।
- বুম লিফট সিস্টেমের জন্য সীমা সুইচ
বুমের বিপরীত ওভারলোডিং এড়াতে একটি যান্ত্রিক খননকারীর বুম উত্তোলন ব্যবস্থা একটি সীমা সুইচ দিয়ে সজ্জিত করা উচিত। সীমা সুইচ সক্রিয় করার পরে, বুম কম করতে সক্ষম হওয়া উচিত।
07যান্ত্রিক খননকারী পরিদর্শন-স্থিতিশীলতা পরিদর্শন
- পরিকল্পিত এবং প্রস্তুতকৃত ঐচ্ছিক ডিভাইস সহ কাজের ডিভাইস এবং সংযুক্তি সহ আর্থমুভিং মেশিনগুলি ড্রাইভারের ম্যানুয়ালে প্রস্তুতকারকের দ্বারা নির্দিষ্ট রক্ষণাবেক্ষণ, সমাবেশ, বিচ্ছিন্নকরণ এবং পরিবহন অপারেটিং অবস্থার অধীনে পর্যাপ্ত স্থিতিশীলতা প্রদান করবে। অপারেটিং মোডে আর্থমোভিং মেশিনারির স্থায়িত্ব বাড়ানোর জন্য ব্যবহৃত ডিভাইসগুলিকে একটি ইন্টারলক বা ওয়ান-ওয়ে ভালভের সাথে লাগানো উচিত যাতে পায়ের পাতার মোজাবিশেষটি ব্যর্থ হয় বা তেল পূর্ণ হয়ে যায়।
- ড্র্যাগলাইন বালতি, ড্র্যাগলাইন অপারেশনে যান্ত্রিক খননকারীর অপারেটিং ক্ষমতা নিম্নলিখিত দুটির মধ্যে ছোট হতে হবে:
ক) গণনাকৃত ওভারটার্নিং লোড P এর 75%;
b) উইঞ্চের সর্বোচ্চ উত্তোলন ক্ষমতা।
ড্র্যাগলাইন বালতি ক্ষমতা ক্রমাঙ্কন প্রস্তুতকারকের দ্বারা নির্ধারিত হবে
- হাতুড়ি এবং বেলচা
দখল এবং বেলচা অবস্থায় একটি যান্ত্রিক খননকারীর অপারেটিং ক্ষমতা নিম্নলিখিত দুটির থেকে ছোট হওয়া উচিত:
· গণনাকৃত ওভারটার্নিং লোড P এর 66% এর উপর ভিত্তি করে;
· উইঞ্চের সর্বোচ্চ উত্তোলন ক্ষমতা।
বেলচাটির ক্ষমতা ক্রমাঙ্কন ISO 7546 অনুসারে নির্ধারিত হবে এবং গ্র্যাব বাকেটের ক্ষমতা ক্রমাঙ্কন প্রস্তুতকারক দ্বারা নির্ধারিত হবে।
পোস্টের সময়: ডিসেম্বর-১৯-২০২৩