




યાંત્રિક ઉત્ખનકોની સલામતી મોટા જોખમો, ખતરનાક સ્થિતિઓ અથવા ભૂગર્ભ બાંધકામના ઉપયોગ, સંચાલન અને જાળવણીમાં જોખમી ઘટનાઓને કારણે થતા જોખમોને દૂર કરવા અથવા ઘટાડવાના તકનીકી પગલાં સાથે સંબંધિત છે. યાંત્રિક ઉત્ખનકો માટે નિરીક્ષણ ધોરણો શું છે? યાંત્રિક ઉત્ખનકોની તપાસ કેવી રીતે કરવામાં આવે છે?

યાંત્રિક ઉત્ખનન
યાંત્રિક ઉત્ખનકો ઉત્ખનકોનો સંદર્ભ આપે છે જેમની ઉપરની રચના વાયર દોરડા દ્વારા ચલાવવામાં આવે છે. તેઓ મુખ્યત્વે ખોદકામની કામગીરી માટે ડ્રેગ પાવડો, આગળના પાવડા અથવા ગ્રેબ બકેટનો ઉપયોગ કરે છે; સામગ્રીને ટેમ્પ કરવા માટે ટેમ્પિંગ પ્લેટોનો ઉપયોગ કરો; ક્રશિંગ કામગીરી માટે હુક્સ અથવા બોલનો ઉપયોગ કરો; અને ખાસ કાર્યકારી ઉપકરણો અને જોડાણોનો ઉપયોગ કરો. સામગ્રી હેન્ડલિંગ હાથ ધરવા.
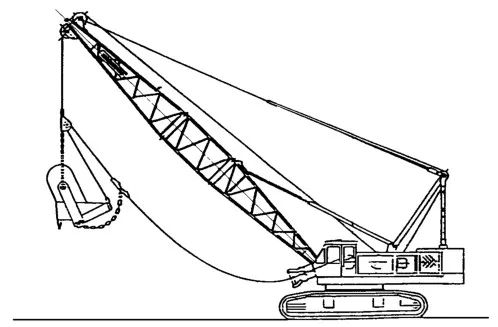
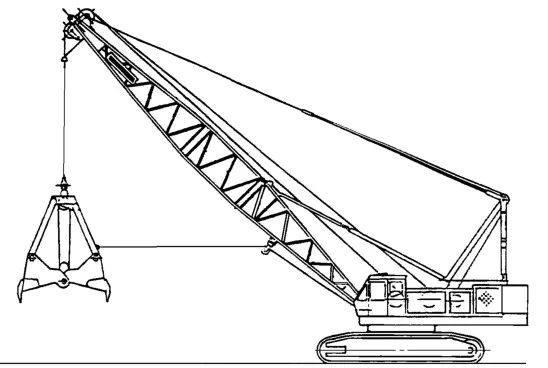
ગ્રેબ સાધનો સાથે ક્રાઉલર યાંત્રિક ઉત્ખનન
યાંત્રિક ઉત્ખનનનિરીક્ષણ પ્રમાણભૂત જરૂરિયાતો
01યાંત્રિક ઉત્ખનન નિરીક્ષણ-ડ્રાઈવર ઓપરેટિંગ સ્થિતિ નિરીક્ષણ
-સાધન
રાઇડ-ઓન મશીનના ડ્રાઇવરની સ્થિતિ પર ડ્રાઇવરની કેબ ઇન્સ્ટોલ કરવી જોઈએ.
1,500 કિગ્રા કરતાં વધુ કાર્યકારી સમૂહ અને ડ્રાઇવરની સ્થિતિ ધરાવતી મશીનો ડ્રાઇવરની કેબથી સજ્જ હોવી જોઈએ. 1,500 કિગ્રા કરતા ઓછા અથવા તેના સમાન કાર્યકારી દળવાળી મશીનોને ડ્રાઇવરની કેબથી સજ્જ કરવાની જરૂર નથી.
અર્થમૂવિંગ મશીનરી એ સુનિશ્ચિત કરવા માટે ડિઝાઇન કરવી જોઈએ કે જ્યારે ઉડતા કાટમાળનું જોખમ હોય (દા.ત. હાઇડ્રોલિક્સનો ઉપયોગ કરીને) એપ્લીકેશનમાં ઉપયોગ કરવામાં આવે ત્યારે પર્યાપ્ત રક્ષણાત્મક ઉપકરણો ઇન્સ્ટોલ કરવામાં આવે.
- ન્યૂનતમ પ્રવૃત્તિ જગ્યા
ડ્રાઇવરો માટે લઘુત્તમ હિલચાલની જગ્યા ISO 3411 નું પાલન કરતી હોવી જોઈએ.
ડ્રાઇવરની સ્થિતિ માટે ન્યૂનતમ જગ્યા અને નિયંત્રણોનું સ્થાન ISO 6682 નું પાલન કરવું જોઈએ
- ફરતા ભાગો
ચાલતા ભાગો જેમ કે વ્હીલ્સ, બેલ્ટ અથવા કામ કરતા સાધનો અથવા જોડાણો સાથે ડ્રાઇવરની સ્થિતિમાંથી આકસ્મિક સંપર્ક ટાળવા માટે જોગવાઈઓ કરવી જોઈએ.
- એન્જિન એક્ઝોસ્ટ
એન્જિનમાંથી નીકળતો એક્ઝોસ્ટ ગેસ ડ્રાઈવર અને કેબના એર ઇનલેટથી દૂર રાખવો જોઈએ
- ડ્રાઇવિંગ લાઇસન્સ ખરીદો અને જમા કરાવો
ડ્રાઇવરની મેન્યુઅલ અથવા અન્ય ઓપરેટિંગ સૂચનાઓને સુરક્ષિત રીતે સંગ્રહિત કરવા માટે ડ્રાઇવરની સ્થિતિની નજીક એક જગ્યા પ્રદાન કરવી જોઈએ. જો ડ્રાઇવરની સ્થિતિ લોક કરી શકાતી નથી અથવા ડ્રાઇવરની કેબ નથી, તો જગ્યા લોક કરી શકાય તેવી હોવી જોઈએ.
- તીક્ષ્ણ ધાર
ડ્રાઈવરના કાર્યસ્થળ પર કોઈ ખુલ્લી તીક્ષ્ણ કિનારીઓ અથવા ખૂણાઓ ન હોવા જોઈએ (જેમ કે છત, આંતરિક ઈન્સ્ટ્રુમેન્ટ પેનલ અને ડ્રાઈવરની સ્થિતિ સુધીનો માર્ગ).
- ડ્રાઇવરની સ્થિતિ પર આબોહવાની પરિસ્થિતિઓ
ડ્રાઇવરની કેબે ડ્રાઇવરને અગમ્ય પ્રતિકૂળ હવામાન પરિસ્થિતિઓથી સુરક્ષિત રાખવું જોઈએ. વેન્ટિલેશન સિસ્ટમ્સ, એડજસ્ટેબલ હીટિંગ સિસ્ટમ્સ અને ગ્લાસ ડિફ્રોસ્ટિંગ સિસ્ટમ્સની તૈયારીઓ નિયમો અનુસાર સ્થાપિત થવી જોઈએ.
-સખત પાઈપો અને નળી
કેબ 5 MPa કરતાં વધુ પ્રવાહી દબાણ અથવા 60 C કરતાં વધુ તાપમાન અને નળીઓથી સજ્જ છે.
- મૂળભૂત પ્રવેશ અને બહાર નીકળો
મૂળભૂત એક્સેસ ઓપનિંગ પ્રદાન કરવામાં આવશે, જેનાં પરિમાણો ISO 2867 અનુસાર હોવા જોઈએ.
- વૈકલ્પિક પ્રવેશ અને બહાર નીકળો
એક વૈકલ્પિક પ્રવેશ/બહાર નીકળો પ્રાથમિક પ્રવેશ/બહારથી અલગ બાજુએ પ્રદાન કરવામાં આવશે. તેના પરિમાણો ISO 2867 નું પાલન કરશે. આ એક બારી અથવા અન્ય દરવાજો હોઈ શકે છે જે કી અથવા ટૂલ્સ વિના ખોલી અથવા ખસેડી શકાય છે. જો પ્રવેશદ્વાર અંદરથી ચાવી અથવા સાધનો વિના ખોલી શકાય છે, તો લૅચનો ઉપયોગ કરો. તોડી શકાય તેવા કાચના દરવાજા અને યોગ્ય કદના બારીઓને પણ યોગ્ય વૈકલ્પિક એક્ઝિટ તરીકે ગણી શકાય, જો કે કેબમાં જરૂરી એસ્કેપ હેમર આપવામાં આવે અને ડ્રાઇવરની પહોંચમાં મૂકવામાં આવે.
- વેન્ટિલેશન સિસ્ટમ
વેન્ટિલેશન સિસ્ટમ 43 m/h કરતાં ઓછી ન હોય તેવા પ્રવાહ દર સાથે ડ્રાઇવરની કેબને તાજી હવા પૂરી પાડવા સક્ષમ હોવી જોઈએ. ફિલ્ટર્સનું પરીક્ષણ SO 10263-2 અનુસાર કરવામાં આવશે.
- ડિફ્રોસ્ટ સિસ્ટમ
ડિફ્રોસ્ટિંગ સિસ્ટમ આગળ અને પાછળની વિંડો ડિફ્રોસ્ટિંગ ડિવાઇસ પ્રદાન કરે છે, જેમ કે હીટિંગ સિસ્ટમ અથવા સમર્પિત ડિફ્રોસ્ટિંગ ડિવાઇસ દ્વારા.
- સુપરચાર્જિંગ સિસ્ટમ
જો પ્રેશરાઈઝેશન સિસ્ટમ સાથેની કેબ પૂરી પાડવામાં આવે, તો પ્રેસરાઈઝેશન સિસ્ટમનું પરીક્ષણ SO 10263-3 ની જોગવાઈઓ અનુસાર કરવામાં આવશે અને તે 50 Pa કરતાં ઓછું ન હોય તેવું સંબંધિત ઇન્ડોર દબાણ પૂરું પાડશે.
- દરવાજા અને બારીઓ
દરવાજા, બારીઓ અને ફ્લૅપ્સને તેમની ઇચ્છિત ઑપરેટિંગ પોઝિશનમાં સુરક્ષિત રીતે સંયમિત રાખવા જોઈએ. મૂળભૂત પ્રવેશદ્વાર અને બહાર નીકળવાના ઉદ્દેશ્યિત ઓપરેટિંગ પોઝિશનમાં સુરક્ષિત ઉદઘાટન જાળવવા માટે રચાયેલ કઠોર નિયંત્રણો દ્વારા દરવાજાને તેમની ઇચ્છિત ઓપરેટિંગ પોઝિશનમાં રાખવામાં આવવી જોઈએ, અને નિયંત્રણો સરળતાથી ડ્રાઇવરની સ્થિતિ અથવા ડ્રાઇવરના પ્રવેશ પ્લેટફોર્મ પરથી મુક્ત થવા જોઈએ.
કારની વિન્ડો સલામતી અથવા સમાન સલામતી કામગીરી સાથે અન્ય સામગ્રી સાથે સ્થાપિત થવી જોઈએ.
ફ્રન્ટ વિન્ડો ઇલેક્ટ્રિક વાઇપર અને વોશરથી સજ્જ હોવી જોઈએ.
વિન્ડો વોશરની પાણીની ટાંકી સરળતાથી સુલભ હોવી જોઈએ.
- આંતરિક લાઇટિંગ
ડ્રાઇવરની કેબ એક નિશ્ચિત આંતરિક લાઇટિંગ ડિવાઇસથી સજ્જ હોવી જોઈએ, જે એન્જિન બંધ થયા પછી પણ કાર્ય કરતી હોવી જોઈએ, જેથી ડ્રાઈવરની સ્થિતિ પ્રકાશિત થઈ શકે અને ડ્રાઈવરનું મેન્યુઅલ વાંચી શકાય.
- ડ્રાઈવરનું રક્ષણાત્મક કવચ
યાંત્રિક ઉત્ખનકો ડ્રાઇવર (ટોચના રક્ષકો અને આગળના રક્ષકો) માટે રક્ષણાત્મક માળખાં સ્થાપિત કરવામાં સક્ષમ હોવા જોઈએ. ઉત્પાદકે રક્ષણાત્મક માળખાં (ટોપ ગાર્ડ્સ અને ફ્રન્ટ ગાર્ડ્સ) પ્રદાન કરવા જોઈએ, જે વર્તમાન એપ્લિકેશન જોખમોના આધારે વપરાશકર્તા દ્વારા પસંદ કરવા જોઈએ.
- ફોલિંગ ઓબ્જેક્ટ પ્રોટેક્ટિવ સ્ટ્રક્ચર (FOPS)
ISO3449 માં ઉલ્લેખિત અપવાદોને બાદ કરતાં, ફોલિંગ ઑબ્જેક્ટના જોખમો સાથેના સ્થળોએ ઉપયોગમાં લેવાતી અપેક્ષિત ચોરસ ક્રેન્સ ફોલિંગ ઑબ્જેક્ટ પ્રોટેક્ટિવ સ્ટ્રક્ચર (FOPS) ઇન્સ્ટોલ કરવામાં સક્ષમ હોવા જોઈએ.
02યાંત્રિક ઉત્ખનન નિરીક્ષણ -ડ્રાઇવરના નિયંત્રણો અને સૂચકાંકો
- ઉપકરણ શરૂ કરો અને બંધ કરો
અર્થમૂવિંગ મશીનરી સ્ટાર્ટિંગ અને સ્ટોપિંગ ડિવાઈસ (જેમ કે કી)થી સજ્જ હોવી જોઈએ અને અનધિકૃત ઉપયોગને રોકવા માટે સ્ટાર્ટિંગ સિસ્ટમ રક્ષણાત્મક ઉપકરણોથી સજ્જ હોવી જોઈએ.
અર્થ-મૂવિંગ મશીનરી એવી રીતે ડિઝાઇન કરવી જોઈએ કે જ્યારે એન્જિન શરૂ થાય અથવા બંધ થાય, ત્યારે નિયંત્રણ શરૂ કર્યા વિના મશીન, કાર્યકારી સાધનો અને જોડાણોને ખસેડવું અશક્ય છે.
- અણધારી કામગીરી
નિયંત્રણ ઉપકરણો કે જે આકસ્મિક કામગીરીને કારણે જોખમનું કારણ બની શકે છે તે જોખમો ઘટાડવાના સિદ્ધાંત અનુસાર ગોઠવાયેલા અથવા અક્ષમ અથવા સુરક્ષિત હોવા જોઈએ. ખાસ કરીને, જ્યારે ડ્રાઈવર ડ્રાઈવરની સ્થિતિમાં પ્રવેશે છે અને બહાર નીકળે છે, ત્યારે જે ઉપકરણ નિયંત્રણને અક્ષમ કરે છે તે સ્વ-સક્રિય કરતું હોવું જોઈએ, અથવા તેને સંબંધિત ઉપકરણો દ્વારા બળજબરીથી ઉત્તેજિત અને સક્રિય કરવામાં આવે છે.
- પેડલ પેડલ
તેમની વચ્ચે યોગ્ય કદ, આકાર અને પર્યાપ્ત અંતર હોવું જોઈએ. ટ્રેડ્સ બિન-સ્લિપ સપાટી હોવી જોઈએ અને સાફ કરવામાં સરળ હોવી જોઈએ. જો પૃથ્વી પર ચાલતા મશીનરીના પેડલ અને ઓટોમોબાઈલના પેડલ સમાન કાર્યો (ક્લચ, બ્રેકિંગ અને એક્સિલરેશન) ધરાવતા હોય, તો મિશ્રણને કારણે થતા જોખમને ટાળવા માટે, પેડલ્સને તે જ રીતે ગોઠવવા જોઈએ.
- જોડાણોનું ઇમરજન્સી લેન્ડિંગ
જો એન્જિન અટકી જાય, તો તે શક્ય હોવું જોઈએ:
· કામ કરતા ઉપકરણ/એટેચમેન્ટને જમીન/રેક પર નીચે કરો;
· વર્ક યુનિટ/એટેચમેન્ટનું નીચું કરવું તે સ્થાન પરથી દેખાય છે જ્યાં ડ્રાઇવર લોઅરિંગ કંટ્રોલને સક્રિય કરે છે:
· કામના સાધનો/એસેસરી સાધનોના દરેક હાઇડ્રોલિક અને ન્યુમેટિક સર્કિટમાં શેષ દબાણને દૂર કરો જે જોખમનું કારણ બની શકે છે. જોડાણો ઘટાડવા માટેની જોગવાઈઓ અને અવશેષ દબાણને દૂર કરવા માટેના માધ્યમો ડ્રાઈવરની સ્થિતિની બહાર સ્થિત હોઈ શકે છે અને તેનું વર્ણન ડ્રાઈવરના માર્ગદર્શિકામાં કરવામાં આવશે.
- અનિયંત્રિત હલનચલન
મશીનો અને કાર્યકારી ઉપકરણોની હિલચાલ અથવા નિશ્ચિત સ્થાનો પરથી જોડાણો, સિવાય કે ડ્રાઇવર દ્વારા ચલાવવામાં આવે ત્યારે, સ્લિપિંગ અથવા ધીમું થવાને કારણે (દા.ત. લીકેજને કારણે) અથવા જ્યારે વીજ પુરવઠો વિક્ષેપિત થાય છે, ત્યારે જોખમ ઉભું ન કરે તેવી શ્રેણીમાં નિયંત્રિત થવું જોઈએ. ખુલ્લી વ્યક્તિઓને.
-વિઝ્યુઅલ ડિસ્પ્લે/કંટ્રોલ પેનલ, સૂચક અને પ્રતીકો
· ડ્રાઈવર દિવસ કે રાત, ડ્રાઈવરની સ્થિતિ પરથી મશીનની સામાન્ય કામગીરીના જરૂરી સંકેતો જોવા માટે સમર્થ હોવા જોઈએ. ઝગઝગાટ ઓછો કરવો જોઈએ.
· મશીનની સામાન્ય કામગીરી અને સલામતી માટેના નિયંત્રણ સૂચકોએ સુરક્ષા અને સંબંધિત બાબતો પર ISO 6011 ની જોગવાઈઓનું પાલન કરવું જોઈએ.
· અર્થમૂવિંગ મશીનરી પર વિઝ્યુઅલ ડિસ્પ્લે/કંટ્રોલ ઉપકરણો માટેના પ્રતીકો લાગુ પડતી હોય તેમ, ISO 6405-1 અથવા S 6405-2 ની જોગવાઈઓનું પાલન કરશે.
- રાઈડ-ઓન મશીનોના નિયંત્રણ ઉપકરણો કે જે જમીન પરથી ચલાવવાના હેતુથી નથી, તે નિયંત્રણ ઉપકરણને જમીન પરથી ઉપાડવાની સંભાવનાને ઘટાડવા માટેના માધ્યમો પૂરા પાડવામાં આવશે.
- નોન-રાઈડ-ઓન મશીનો હોલ્ડિંગ ઓપરેશન ઉપકરણથી સજ્જ હોવા જોઈએ જે મશીનની કામગીરીને અટકાવે છે અને જ્યારે ડ્રાઈવર નિયંત્રણ છોડે છે ત્યારે સાધનની ખતરનાક હિલચાલને અટકાવે છે. ઓપરેટર તરફ મશીનની આકસ્મિક હિલચાલના જોખમને ધ્યાનમાં રાખીને નિયંત્રણો ડિઝાઇન કરવા જોઈએ.
03યાંત્રિક ઉત્ખનન નિરીક્ષણ-સ્ટીયરિંગ સિસ્ટમ નિરીક્ષણ
- સ્ટીયરીંગ સિસ્ટમ એ સુનિશ્ચિત કરવું જોઈએ કે સ્ટીયરીંગ દાવપેચ તેમાં નિર્દિષ્ટ કરેલ સ્ટીયરીંગ દિશા સાથે સુસંગત છે.ISO 10968.
- ફોરવર્ડ/રિવર્સ બેલ્ટ-કવર્ડ મશીનો 20 કિમી/કલાકથી વધુ ઝડપે મુસાફરી કરતા બેલ્ટ-કવર્ડ મશીનની સ્ટીયરિંગ સિસ્ટમ નમ્ર હોવી જોઈએ.
04યાંત્રિક ઉત્ખનન નિરીક્ષણ-સ્વિંગ બ્રેક સિસ્ટમ નિરીક્ષણ
યાંત્રિક ઉત્ખનકો સ્વિંગ ઓપરેશન અને પાર્કિંગ બ્રેક સિસ્ટમ્સથી સજ્જ હોવા જોઈએ.
05યાંત્રિક ઉત્ખનન નિરીક્ષણ-લિફ્ટિંગ સિસ્ટમ નિરીક્ષણ
- ફરજિયાત નિયંત્રણ (વધારો/નીચો)
યાંત્રિક ઉત્ખનનની લિફ્ટિંગ સિસ્ટમ બ્રેકથી સજ્જ હોવી જોઈએ. હેન્ડલ અથવા પેડલ છોડ્યા પછી તરત જ બ્રેક સક્રિય થવી જોઈએ. બ્રેકિંગ સિસ્ટમ પાવર ગુમાવવાના કિસ્સામાં અથવા બળજબરીથી નિયંત્રણમાં ઘટાડો થવાના કિસ્સામાં આપમેળે સક્રિય થવી જોઈએ અને ઉત્ખનનની કામગીરીની સ્થિરતાને અસર કરવી જોઈએ નહીં. બ્રેકિંગ સિસ્ટમ 4.8 માં ઉલ્લેખિત રેટેડ લોડ જાળવવા સક્ષમ હોવી જોઈએ
- ફ્રી ફોલ ઓપરેશન
યાંત્રિક ખોદકામ કરનારની હોસ્ટિંગ સિસ્ટમ બ્રેકથી સજ્જ હોવી જોઈએ અને નીચેની શરતો હેઠળ તરત જ સક્રિય થવી જોઈએ:--પગના પેડલને અનુરૂપ કામગીરી;
હેન્ડ લિવર છોડો.
બ્રેક્સની ડિઝાઇન મૂવિંગ લોડની સતત બ્રેકિંગ પૂરી પાડવા માટે કરવામાં આવશે. માર્ગદર્શિકા વાયર દોરડાને વધતા અથવા નિયંત્રણની બહાર પડતા અટકાવવા માટે ડિઝાઇન કરવી જોઈએ.
- સ્વિચ કરો
ફરજિયાત કંટ્રોલ ઓપરેશનથી ફ્રી ડ્રોપ ઓપરેશન પર સ્વિચ કરતી વખતે, લોડનો કોઈ ડ્રોપ ન હોવો જોઈએ.
-તેજી
અચાનક અનલોડિંગની ઘટનામાં યાંત્રિક ઉત્ખનનની બૂમ રિબાઉન્ડથી સુરક્ષિત હોવી જોઈએ. રિવર્સ ઓવરલોડિંગ ટાળવા માટે બૂમ લિમિટ સ્વીચથી સજ્જ હોવી જોઈએ.
બૂમના વિવિધ ભાગો વચ્ચેના જોડાણો (બોલ્ટ્સ) બૂમની નીચે ઊભા રહેવાની જરૂરિયાત વિના ઇન્સ્ટોલેશન અને દૂર કરવાની મંજૂરી આપવા માટે ડિઝાઇન કરવા જોઈએ.
- વાયર દોરડું
યાંત્રિક ઉત્ખનન વાયર દોરડાનું સલામતી પરિબળ નક્કી કરવું જોઈએ.
-વાયર દોરડાનું ડ્રમ અને વાયર દોરડાની પુલી
· વાયર દોરડાના ડ્રમ્સ અને વાયર દોરડાની પુલીની ડિઝાઇન અને ઉત્પાદનમાં વાયર દોરડાને નુકસાન થતું અટકાવવું જોઈએ અને વાયર દોરડા માર્ગદર્શિકા બુશિંગના સ્લિપેજ અથવા ડિટેચમેન્ટને અટકાવવું જોઈએ.
વાયર દોરડાના ડ્રમ વ્યાસ અને વાયર દોરડાના વ્યાસનો ગુણોત્તર ઓછામાં ઓછો 20:1 હોવો જોઈએ.
· દોરડાના ગ્રુવ પર માપવામાં આવતા વાયર દોરડાના વ્યાસ અને વાયર દોરડાની પુલી વ્યાસનો ગુણોત્તર ઓછામાં ઓછો 22:1 હોવો જોઈએ. ડ્રેગલાઇન માર્ગદર્શિકાઓ, માર્ગદર્શિકા પુલી અને સહાયક વાયર દોરડા બાકાત છે.
ક્રિમ્પિંગ રિમ, વિંચ ડ્રમની ધાર વાયર દોરડાના વ્યાસ કરતાં ઓછામાં ઓછી 1.5 ગણી હોવી જોઈએ.
06યાંત્રિક ઉત્ખનન નિરીક્ષણ-પ્રતિબંધ ઉપકરણ નિરીક્ષણ
-લોડ મોમેન્ટ લિમિટર
સામગ્રી સંભાળવાની સ્થિતિમાં, ઓવરલોડ ટાળવા માટે હોસ્ટિંગ સિસ્ટમ અને બૂમ હોસ્ટિંગ સિસ્ટમ લોડ મોમેન્ટ લિમિટરથી સજ્જ હોવી જોઈએ. લોડ મોમેન્ટ લિમિટર 10% ની સહિષ્ણુતા સાથે, 4.8 માં ઉલ્લેખિત રેટ કરેલ લોડ પર સેટ હોવું જોઈએ. લોડ મોમેન્ટ લિમિટર ઓપરેટ થયા પછી, લોડ મોમેન્ટ ઘટાડવી જોઈએ. 4.7.2 લિમિટ સ્વીચ ઉપાડો.
સામગ્રી સંભાળવાની સ્થિતિમાં, યાંત્રિક ઉત્ખનકો લિફ્ટિંગ હલનચલન માટે મર્યાદા સ્વીચોથી સજ્જ હોવા જોઈએ. મર્યાદા સ્વીચ સક્રિય થયા પછી, તેજી ઓછી થવા માટે સક્ષમ હોવી જોઈએ.
-બૂમ લિફ્ટ સિસ્ટમ માટે લિમિટ સ્વીચ
મિકેનિકલ એક્સેવેટરની બૂમ લિફ્ટિંગ સિસ્ટમ બૂમના રિવર્સ ઓવરલોડિંગને ટાળવા માટે લિમિટ સ્વીચથી સજ્જ હોવી જોઈએ. મર્યાદા સ્વીચ સક્રિય થયા પછી, તેજી ઓછી થવા માટે સક્ષમ હોવી જોઈએ.
07યાંત્રિક ઉત્ખનન નિરીક્ષણ-સ્થિરતા નિરીક્ષણ
- કાર્યકારી ઉપકરણો અને જોડાણો સાથેની અર્થમૂવિંગ મશીનરી, ડિઝાઇન અને ઉત્પાદિત વૈકલ્પિક ઉપકરણો સહિત, ડ્રાઇવરના માર્ગદર્શિકામાં નિર્માતા દ્વારા નિર્દિષ્ટ જાળવણી, એસેમ્બલી, ડિસએસેમ્બલી અને પરિવહન ઓપરેટિંગ શરતો હેઠળ પૂરતી સ્થિરતા પ્રદાન કરશે. ઓપરેટિંગ મોડમાં અર્થમૂવિંગ મશીનરીની સ્થિરતા વધારવા માટે વપરાતા ઉપકરણોને ઇન્ટરલોક અથવા વન-વે વાલ્વ સાથે ફીટ કરવા જોઈએ જેથી નળી નિષ્ફળ જાય અથવા તેલ ભરાઈ જાય.
- ડ્રેગલાઈન બકેટ, ડ્રેગલાઈન ઓપરેશનમાં યાંત્રિક ઉત્ખનનની ઓપરેટિંગ ક્ષમતા નીચેના બેમાંથી નાની હોવી જોઈએ:
a) ગણતરી કરેલ ઓવરટર્નિંગ લોડ P ના 75%;
b) વિંચની મહત્તમ લિફ્ટિંગ ક્ષમતા.
ડ્રેગલાઇન બકેટ ક્ષમતાનું માપાંકન ઉત્પાદક દ્વારા નક્કી કરવામાં આવશે
- ગ્રેપલ અને પાવડો
ગ્રેબ અને પાવડો સ્થિતિમાં યાંત્રિક ઉત્ખનનની કાર્યક્ષમતા નીચેના બેમાંથી નાની હોવી જોઈએ:
· ગણતરી કરેલ ઓવરટર્નિંગ લોડ P ના 66% પર આધારિત;
· વિંચની મહત્તમ લિફ્ટિંગ ક્ષમતા.
પાવડાની ક્ષમતાનું માપાંકન ISO 7546 અનુસાર નક્કી કરવામાં આવશે અને ગ્રેબ બકેટની ક્ષમતાનું માપાંકન ઉત્પાદક દ્વારા નક્કી કરવામાં આવશે.
પોસ્ટ સમય: ડિસેમ્બર-19-2023