




Մեխանիկական էքսկավատորների անվտանգությունը կապված է հողային շինարարության օգտագործման, շահագործման և պահպանման հետ կապված խոշոր վտանգների, վտանգավոր վիճակների կամ վտանգավոր իրադարձությունների հետևանքով առաջացած ռիսկերի վերացման կամ նվազեցման տեխնիկական միջոցների հետ: Որո՞նք են մեխանիկական էքսկավատորների ստուգման չափանիշները: Ինչպե՞ս են ստուգվում մեխանիկական էքսկավատորները:

Մեխանիկական էքսկավատոր
Մեխանիկական էքսկավատորները վերաբերում են էքսկավատորներին, որոնց վերին կառույցները շահագործվում են մետաղական պարաններով: Նրանք հիմնականում օգտագործում են քարշ թիակներ, առջևի թիակներ կամ գրավի դույլեր պեղումների համար. օգտագործեք խցանման թիթեղներ նյութերը սեղմելու համար. օգտագործեք կեռիկներ կամ գնդիկներ ջախջախիչ գործողությունների համար. և օգտագործել հատուկ աշխատանքային սարքեր և կցորդներ: Իրականացնել նյութերի մշակում:
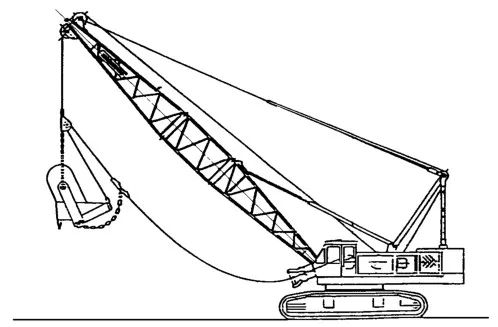
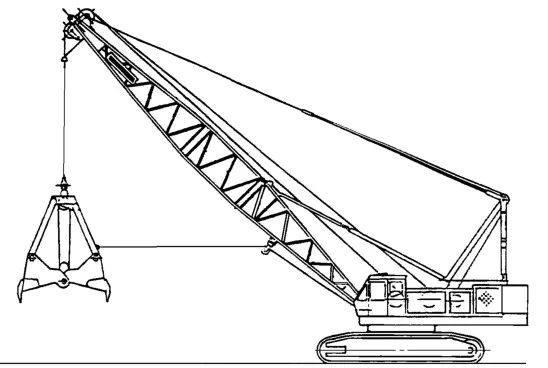
Սողուն մեխանիկական էքսկավատոր՝ գրավիչ սարքավորումներով
Մեխանիկական էքսկավատորստուգման ստանդարտ պահանջներ
01Մեխանիկական էքսկավատորի ստուգում-վարորդի աշխատանքային դիրքի ստուգում
- Սարքավորումներ
Վարորդի խցիկը պետք է տեղադրվի մեքենա վարող մեքենայի վարորդի դիրքում:
1500 կգ-ից ավելի աշխատանքային զանգվածով և վարորդի դիրք ունեցող մեքենաները պետք է հագեցած լինեն վարորդի խցիկով: 1500 կգ-ից պակաս կամ հավասար աշխատանքային զանգված ունեցող մեքենաները վարորդի խցիկով հագեցված չեն պահանջվում:
Հողատար մեքենաները պետք է նախագծված լինեն այնպես, որ ապահովեն համապատասխան պաշտպանիչ սարքերի տեղադրումը, երբ օգտագործվում են այնպիսի ծրագրերում, որտեղ առկա է թռչող բեկորների վտանգ (օրինակ՝ հիդրավլիկ սարքերի օգտագործումը):
- Նվազագույն գործունեության տարածք
Վարորդների շարժման նվազագույն տարածքը պետք է համապատասխանի ISO 3411-ին:
Վարորդի դիրքի և կառավարիչների տեղադրության նվազագույն տարածքը պետք է համապատասխանի ISO 6682-ին
- Շարժվող մասեր
Պետք է միջոցներ ձեռնարկվեն՝ վարորդի դիրքից պատահական շփումից խուսափելու համար շարժվող մասերի հետ, ինչպիսիք են անիվները, գոտիները կամ աշխատանքային սարքավորումները կամ կցորդները:
- Շարժիչի արտանետում
Շարժիչի արտանետվող գազը պետք է հեռու պահվի վարորդից և խցիկի օդի մուտքից
- Վարորդական վկայականի գնում և ավանդ
Վարորդի դիրքի մոտ պետք է տարածք տրամադրվի՝ վարորդի ձեռնարկը կամ այլ շահագործման հրահանգները անվտանգ պահելու համար: Եթե վարորդի դիրքը հնարավոր չէ կողպել կամ վարորդի խցիկ չկա, ապա տարածքը պետք է կողպվի:
- Սուր եզրեր
Վարորդի աշխատանքային տարածքի վրա չպետք է լինեն բաց սուր եզրեր կամ անկյուններ (օրինակ՝ առաստաղը, գործիքների ներքին վահանակը և անցումը դեպի վարորդի դիրք):
-Կլիմայական պայմանները վարորդի դիրքում
Վարորդի խցիկը պետք է պաշտպանի վարորդին կանխատեսելի անբարենպաստ եղանակային պայմաններից: Օդափոխման համակարգերի, կարգավորվող ջեռուցման համակարգերի և ապակու հալեցման համակարգերի պատրաստուկները պետք է տեղադրվեն կանոնակարգերի համաձայն:
- Կոշտ խողովակներ և գուլպաներ
Խցիկը հագեցած է 5 ՄՊա-ից ավելի հեղուկի ճնշմամբ կամ 60 C-ից բարձր ջերմաստիճանով և ճկուն խողովակներով:
- Հիմնական մուտքերն ու ելքերը
Պետք է նախատեսվի հիմնական մուտքի բացվածք, որի չափերը պետք է համապատասխանեն ISO 2867-ին:
- Այլընտրանքային մուտք և ելք
Այլընտրանքային մուտք/ելք պետք է նախատեսվի առաջնային մուտքից/ելքից տարբեր կողմում: Դրա չափերը պետք է համապատասխանեն ISO 2867-ին: Սա կարող է լինել պատուհան կամ մեկ այլ դուռ, որը կարելի է բացել կամ տեղափոխել առանց բանալիների կամ գործիքների: Եթե մուտքը կարող է բացվել ներսից առանց բանալիի կամ գործիքների, օգտագործեք սողնակ: Հարմար չափերի կոտրվող ապակե դռներն ու պատուհանները նույնպես կարող են համարվել հարմար այլընտրանքային ելքեր՝ պայմանով, որ անհրաժեշտ փախուստի մուրճը տեղադրված է խցիկում և տեղադրված է վարորդի հասանելիության սահմաններում։
-Օդափոխման համակարգ
Օդափոխման համակարգը պետք է կարողանա մաքուր օդ ապահովել վարորդի խցիկին՝ 43 մ/ժ-ից ոչ պակաս հոսքի արագությամբ: Զտիչները պետք է փորձարկվեն SO 10263-2-ի համաձայն:
-Հալեցման համակարգ
Հալեցման համակարգը պետք է ապահովի առջևի և հետևի ապակիների հալեցման սարքեր, օրինակ՝ ջեռուցման համակարգի կամ հատուկ հալեցնող սարքի միջոցով:
-Գերլիցքավորման համակարգ
Եթե ապահովված է ճնշման համակարգով խցիկ, ապա ճնշման համակարգը պետք է փորձարկվի SO 10263-3-ի դրույթների համաձայն և պետք է ապահովի 50 Պա-ից ոչ պակաս հարաբերական ճնշում:
-Դռներ և պատուհաններ
Դռները, պատուհանները և փեղկերը պետք է ապահով կերպով զսպված լինեն իրենց նախատեսված աշխատանքային դիրքերում: Դռները պետք է պահվեն իրենց նախատեսված աշխատանքային դիրքում կոշտ արգելակներով, որոնք նախատեսված են հիմնական մուտքի և ելքի անվտանգ բացումը նախատեսված աշխատանքային դիրքում պահպանելու համար, և արգելակները պետք է հեշտությամբ ազատվեն վարորդի դիրքից կամ վարորդի մուտքի հարթակից:
Մեքենայի ապակիները պետք է տեղադրվեն անվտանգության կամ նույն անվտանգության ապահովման այլ նյութերով:
Առջևի պատուհանները պետք է հագեցած լինեն էլեկտրական մաքրիչով և լվացքի մեքենաներով:
Պատուհանների լվացքի ջրի բաքը պետք է հեշտությամբ հասանելի լինի:
- Ներքին լուսավորություն
Վարորդի խցիկը պետք է հագեցած լինի ֆիքսված ներքին լուսավորող սարքով, որը դեռ պետք է գործի շարժիչն անջատելուց հետո, որպեսզի կարողանա լուսավորել վարորդի դիրքը և կարդալ վարորդի ձեռնարկը:
- Վարորդի պաշտպանիչ վահան
Մեխանիկական էքսկավատորները պետք է կարողանան վարորդի համար պաշտպանիչ կառույցներ տեղադրել (վերին և առջևի պաշտպանիչները): Արտադրողը պետք է ապահովի պաշտպանիչ կառույցներ (վերին և առջևի պաշտպանիչներ), որոնք պետք է ընտրվեն օգտագործողի կողմից՝ ելնելով առկա կիրառական ռիսկերից:
-Ընկնող օբյեկտների պաշտպանիչ կառուցվածք (FOPS)
Բացառությամբ ISO3449-ում նշված բացառությունների, քառակուսի կռունկները, որոնք ակնկալվում է, որ կօգտագործվեն ընկնող օբյեկտների վտանգի վայրերում, պետք է նախագծված լինեն այնպես, որ կարողանան տեղադրել ընկնող օբյեկտների պաշտպանիչ կառուցվածք (FOPS):
02Մեխանիկական էքսկավատորի ստուգում -Վարորդի կառավարում և ցուցիչներ
- Գործարկել և դադարեցնել սարքը
Հողատար մեքենաները պետք է հագեցած լինեն մեկնարկային և կանգնեցնող սարքերով (օրինակ՝ բանալիներ), իսկ գործարկման համակարգը պետք է ապահովված լինի պաշտպանիչ սարքերով՝ չթույլատրված օգտագործումը կանխելու համար:
Երկիր տեղափոխող մեքենաները պետք է նախագծված լինեն այնպես, որ շարժիչը գործարկելու կամ անջատելու դեպքում անհնար լինի տեղափոխել մեքենան, աշխատանքային սարքավորումները և կցորդները՝ առանց գործարկման կարգավորիչների։
- Անսպասելի գործողություն
Կառավարման սարքերը, որոնք կարող են վտանգ առաջացնել պատահական շահագործման հետևանքով, պետք է դասավորվեն կամ անջատվեն կամ պաշտպանված լինեն ռիսկերը նվազագույնի հասցնելու սկզբունքին համապատասխան: Մասնավորապես, երբ վարորդը մտնում և դուրս է գալիս վարորդի դիրքից, կառավարումն անջատող սարքը պետք է ինքնագործարկվի, կամ այն բռնի խթանվի և ակտիվացվի համապատասխան սարքերի միջոցով։
- ոտնակով ոտնակ
Նրանց միջև պետք է լինի համապատասխան չափ, ձև և համապատասխան տարածություն: Քայլերը պետք է ունենան չսահող մակերես և հեշտությամբ մաքրվեն: Եթե հողատար մեքենաների ոտնակները և ավտոմեքենաների ոտնակները ունեն միևնույն գործառույթները (կցորդիչ, արգելակում և արագացում), ապա խառնվելու հետևանքով առաջացած վտանգից խուսափելու համար ոտնակները պետք է դասավորվեն նույն ձևով:
- Կցորդների վթարային վայրէջք
Եթե շարժիչը կանգ է առնում, ապա պետք է հնարավոր լինի.
· Աշխատանքային սարքը/կցորդն իջեցրեք գետնին/դարակին;
· Աշխատանքային միավորի/կցորդի իջեցումը տեսանելի է այն դիրքից, որտեղ վարորդը միացնում է իջեցման կառավարումը.
· Վերացնել մնացորդային ճնշումը աշխատանքային սարքավորումների/պարագաների սարքավորումների յուրաքանչյուր հիդրավլիկ և օդաճնշական միացումում, որը կարող է առաջացնել ռիսկեր: Կցորդների իջեցման և մնացորդային ճնշումը հեռացնելու միջոցները կարող են տեղակայվել վարորդի դիրքից դուրս և պետք է նկարագրված լինեն վարորդի ձեռնարկում:
- Անվերահսկելի շարժում
Մեքենաների և աշխատանքային սարքերի կամ կցորդների տեղաշարժը ֆիքսված դիրքերից, բացառությամբ այն դեպքերի, երբ կառավարվում է վարորդի կողմից, սայթաքման կամ դանդաղման պատճառով (օրինակ՝ արտահոսքի հետևանքով) կամ երբ էլեկտրամատակարարումն ընդհատվում է, պետք է վերահսկվի այնպիսի տիրույթում, որը վտանգ չի ներկայացնում: բացահայտված անձանց.
-Վիզուալ էկրաններ/կառավարման վահանակներ, ցուցիչներ և նշաններ
· Վարորդը պետք է կարողանա տեսնել մեքենայի բնականոն աշխատանքի անհրաժեշտ ցուցումները վարորդի դիրքից՝ ցերեկ կամ գիշեր: Շողալը պետք է նվազագույնի հասցվի:
· Մեքենայի նորմալ աշխատանքի և անվտանգության վերահսկման ցուցիչները պետք է համապատասխանեն ISO 6011-ի դրույթներին անվտանգության և հարակից հարցերի վերաբերյալ:
· Հողային մեքենաների վրա տեսողական ցուցադրման/կառավարման սարքերի նշանները պետք է համապատասխանեն ISO 6405-1 կամ S 6405-2-ի դրույթներին, ինչպես կիրառելի է:
- Ղեկավար մեքենաների կառավարման սարքերը, որոնք նախատեսված չեն գետնից շահագործելու համար, պետք է ապահովված լինեն այնպիսի միջոցներով, որոնք նվազագույնի են հասցնում կառավարման սարքը գետնից բարձրացնելու հնարավորությունը:
- Չվարվող մեքենաները պետք է հագեցած լինեն պահող սարքով, որը դադարեցնում է մեքենայի աշխատանքը և սարքի վտանգավոր շարժումը, երբ վարորդը արձակում է կառավարումը: Վերահսկիչ սարքերը պետք է նախագծված լինեն այնպես, որ հաշվի առնվի մեքենայի պատահական շարժման վտանգը դեպի օպերատոր:
03Մեխանիկական էքսկավատորի ստուգում-ղեկային համակարգի ստուգում
- Ղեկավարման համակարգը պետք է ապահովի, որ ղեկային մանևրը համապատասխանում է ղեկի ծրագրային ուղղությանը, որը նշված է.ISO 10968.
- 20 կմ/ժ-ից ավելի արագությամբ շարժվող գոտիով ծածկված մեքենայի ղեկային համակարգը պետք է լինի նուրբ:
04Մեխանիկական էքսկավատորի ստուգում-ճոճվող արգելակային համակարգի ստուգում
Մեխանիկական էքսկավատորները պետք է հագեցած լինեն ճոճվող աշխատանքի և կայանման արգելակային համակարգերով:
05Մեխանիկական էքսկավատորի ստուգում-ամբարձիչ համակարգի ստուգում
- Հարկադիր հսկողություն (բարձրացնել/իջեցնել)
Մեխանիկական էքսկավատորի ամբարձիչ համակարգը պետք է հագեցած լինի արգելակով: Արգելակը պետք է ակտիվացվի բռնակը կամ ոտնակը բաց թողնելուց անմիջապես հետո: Արգելակման համակարգը պետք է ավտոմատ կերպով ակտիվանա հոսանքի կորստի կամ հսկողության հարկադիր անկման դեպքում և չպետք է ազդի էքսկավատորի աշխատանքի կայունության վրա: Արգելակում Համակարգը պետք է կարողանա պահպանել 4.8 կետում նշված անվանական բեռը
-Ազատ անկման գործողություն
Մեխանիկական էքսկավատորի ամբարձիչ համակարգը պետք է հագեցած լինի արգելակով և պետք է անմիջապես գործարկվի հետևյալ պայմաններում.
Ազատեք ձեռքի լծակը:
Արգելակները պետք է նախագծված լինեն շարժվող բեռի շարունակական արգելակում ապահովելու համար: Ուղեցույցը պետք է նախագծված լինի այնպես, որ լարային պարանը չբարձրանա կամ չընկնի վերահսկողությունից:
- Անջատիչ
Հարկադիր կառավարման գործողությունից ազատ անկման գործողության անցնելիս բեռի անկում չպետք է լինի:
- բում
Մեխանիկական էքսկավատորի բումը պետք է պաշտպանված լինի հանկարծակի բեռնաթափման դեպքում ետադարձից: Հակադարձ ծանրաբեռնվածությունից խուսափելու համար բումը պետք է հագեցած լինի սահմանային անջատիչով:
Բումի տարբեր մասերի միջև կապերը (պտուտակներ) պետք է նախագծված լինեն այնպես, որ թույլ տան տեղադրումը և հեռացումը` առանց անձնակազմի բումի տակ կանգնելու անհրաժեշտության:
-Մետաղական պարան
Պետք է որոշվի մեխանիկական էքսկավատորի մետաղալարերի անվտանգության գործակիցը:
-Մետաղական պարան թմբուկ և մետաղալարով ճախարակ
· Լարային պարանների թմբուկների և մետաղալարերի ճախարակների նախագծումն ու արտադրությունը պետք է կանխի մետաղական պարանի վնասումը և մետաղալարերի ուղեցույցի թփերի սահումը կամ անջատումը:
· Հաղորդալարերի թմբուկի տրամագծի և մետաղալարերի տրամագծի հարաբերակցությունը պետք է լինի առնվազն 20:1:
· Հաղորդալարերի ճախարակի տրամագծի և պարանի ակոսում չափվող պարանների տրամագծի հարաբերակցությունը պետք է լինի առնվազն 22:1: Բացառվում են գծային ուղեցույցները, ուղղորդող ճախարակները և օժանդակ մետաղական պարանները:
· Ծալքավոր եզր, ճախարակի թմբուկի եզրը պետք է լինի մետաղական պարանի տրամագծից առնվազն 1,5 անգամ:
06Մեխանիկական էքսկավատորի ստուգում-սահմանափակող սարքի ստուգում
- Բեռի պահի սահմանափակիչ
Նյութերի բեռնաթափման պայմաններում վերամբարձ համակարգը և բումի բարձրացման համակարգը պետք է հագեցած լինեն բեռնվածության պահի սահմանափակիչով՝ գերբեռնվածությունից խուսափելու համար: Բեռի մոմենտի սահմանափակիչը պետք է սահմանվի 4.8 կետում նշված անվանական բեռի վրա՝ 10% հանդուրժողականությամբ: Բեռի պահի սահմանափակիչը գործարկելուց հետո բեռի պահը պետք է կրճատվի: 4.7.2 Բարձրացրեք սահմանային անջատիչը:
Նյութերի բեռնաթափման պայմաններում մեխանիկական էքսկավատորները պետք է հագեցված լինեն բարձրացնող շարժումների համար սահմանային անջատիչներով: Սահմանային անջատիչն ակտիվացնելուց հետո բումը պետք է կարողանա իջնել:
- Սահմանային անջատիչ բումի բարձրացման համակարգի համար
Մեխանիկական էքսկավատորի բումի բարձրացման համակարգը պետք է հագեցած լինի սահմանային անջատիչով, որպեսզի խուսափի բումի հակառակ ծանրաբեռնվածությունից: Սահմանային անջատիչն ակտիվացնելուց հետո բումը պետք է կարողանա իջնել:
07Մեխանիկական էքսկավատորի ստուգում-կայունության ստուգում
- Աշխատող սարքերով և կցորդներով հողատար մեքենաները, ներառյալ կամընտիր սարքերը, նախագծված և արտադրված պետք է ապահովեն բավարար կայունություն վարորդի ձեռնարկում արտադրողի կողմից նշված տեխնիկական պայմանների պահպանման, հավաքման, ապամոնտաժման և փոխադրման պայմաններում: Աշխատանքային ռեժիմում հողային մեքենաների կայունությունը բարձրացնելու համար օգտագործվող սարքերը պետք է ունենան կողպեք կամ միակողմանի փական՝ գուլպանը տեղում պահելու համար, եթե այն խափանվի կամ լցվի յուղով:
- Քարշելային դույլ, մեխանիկական էքսկավատորի աշխատանքային հզորությունը վանդակաճաղի շահագործման ժամանակ պետք է լինի փոքրը հետևյալ երկուսից.
ա) 75% հաշվարկված շրջման բեռի P.
բ) ճախարակի առավելագույն բարձրացնող հզորությունը.
Ձգվող դույլի հզորության չափորոշումը պետք է որոշվի արտադրողի կողմից
-Բահ ու բահ
Մեխանիկական էքսկավատորի գործառնական հզորությունը գրավի և թիակի պայմաններում պետք է լինի փոքրը հետևյալ երկուսից.
· Ելնելով 66% հաշվարկված շրջադարձային բեռից P;
· Ճախարակի առավելագույն բարձրացնող հզորություն:
Բահի հզորության չափաբերումը պետք է որոշվի ISO 7546-ի համաձայն, իսկ բռնող դույլի տարողունակությունը պետք է որոշվի արտադրողի կողմից:
Հրապարակման ժամանակը՝ Dec-19-2023